

 PR
PR2025.11.27
数理最適化のエキスパートが断言「AIブームで見落とされがちな重要技術」 1,300社が導入した「演繹的AI」が意思決定を変える
Robot Ant Swarms Have Arrived!(全1記事)
コピーリンクをコピー
ブックマーク記事をブックマーク
マイケル・アランダ氏:高度な会話が可能な「ソフィア」から、高齢者ケアのために開発された「ロメオ」に至るまで、人間を模した機能を持つロボットはたくさんあります。

ある開発者たちは、思いがけない生物からヒントを得ています。その生物とは、アリです。

このロボットは「トライボット」と名づけられ「アリにヒントを得た」と聞いて想像するような、多数の足はありません。むしろ『マインクラフト』のクリーパーのような外観です。
しかし実は、足にはあまり重要性はありません。これはなんと「アギトアリ」の驚くべき下アゴにヒントを得たロボットなのです。

アギトアリは、時速200キロメートルもの速度で跳ね閉じる強力な下アゴを持ち、その勢いで空中に放り出され、敵から逃れることができます。だから足では無く、この下アゴを模したのがトライボットなのです。

トライボットは、折り畳み式のプリント基板の本体に、いくつかの機器が加えられています。バネやアクチュエータが足と繋がり、筋肉の役割を果たしてジャンプの動力源となります。

ジャンプ時の足の角度と加速を調整することにより、高度や距離を出したり、障害物を超えたりすることができるのです。

平坦な場所を移動する場合は、シャクトリムシのように這って動きます。

アプリケーションは少々脆弱ですが、トライボットは産業活用が可能です。例えば調査や、倉庫などへの消毒剤散布、農作物が収穫に適しているかのチェックなど、サイズが大きなロボットであればむしろダメージを出してしまうような作業に適しています。トライボットは、多くの可能性を秘めているのです。
さて、トライボットは最初の小型ロボットではありませんが、他とはまったく異なるアプローチを取っています。類似のサイズのロボットには移動に車輪が使われているため、ジャンプにはさらに付属品が必要です。つまり、追加の稼働部品がたくさん必要になってしまうため、作るのが大変で壊れやすくなります。

しかしトライボットは、一連の動きをわずかな部品で実現できます。

トライボットはあまりにも小型であるため、単体でできることは限られているのではないかと思ってしまいますが、複数が協動することで真の威力を発揮します。2019年のある論文では、単体のロボットでは動かせないブロックを、複数で移動させることで、これが実証されました。実験は、トライボットにそれぞれ異なる作業を分担させて実施されました。

1基のトライボットがリーダーの役割を担い、作業を指揮しました。リーダー役の指揮の下、2基の労働者役のトライボットがブロックを押し、モニター役のトライボットが、反対側でブロックの移動距離を測定しました。
トライボットはそれぞれが赤外線モニターを搭載し、1メートル以内であれば互いへの通信が可能でした。しかし通信はブロックを貫通できないため、5基目のトライボットがメッセンジャー役を果たしました。メッセンジャー役のトライボットは、モニター役とリーダー役との間の通信を中継し、労働者役へ押すのをやめるタイミングを伝えました。

ここで画期的なのは、全てのトライボットがいずれの役であっても担うことが可能な点です。そのため、例え1基にトラブルが生じたとしても、他が補完できます。しかも類似の性能を持つロボットと比較しても、トライボットは軽く、燃費も良いのです。
大きく等身大のロボットは、これからも常に需要がありそうですが、将来のロボティクスにはスモールプレイヤーも登場し、多彩な活躍をすることでしょう。
続きを読むには会員登録
(無料)が必要です。
会員登録していただくと、すべての記事が制限なく閲覧でき、
スピーカーフォローや記事のブックマークなど、便利な機能がご利用いただけます。
すでに会員の方はこちらからログイン
名刺アプリ「Eight」をご利用中の方は
こちらを読み込むだけで、すぐに記事が読めます!
スマホで読み込んで
ログインまたは登録作業をスキップ
関連タグ:
この記事をブックマークすると、同じログの新着記事をマイページでお知らせします
PR2025.11.27
数理最適化のエキスパートが断言「AIブームで見落とされがちな重要技術」 1,300社が導入した「演繹的AI」が意思決定を変える
 PR
PR2025.11.28
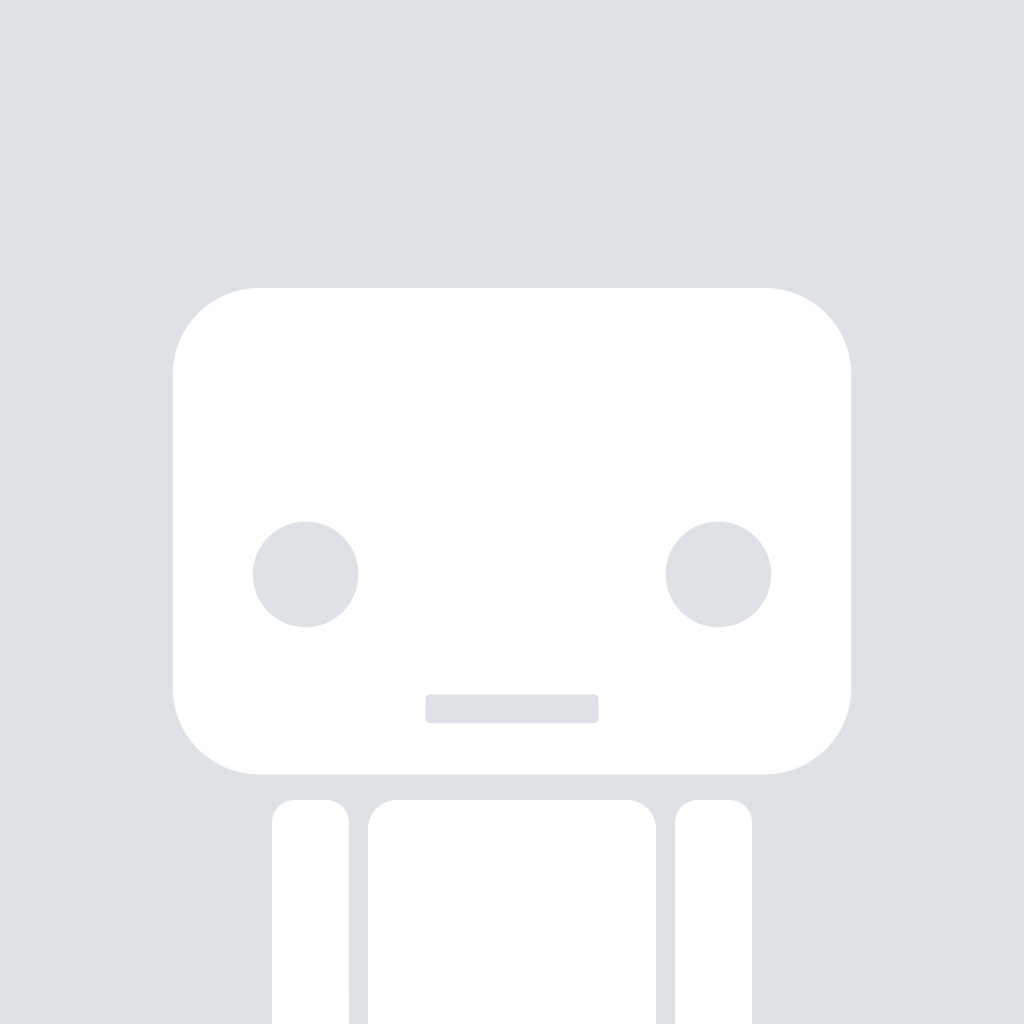
「あの人がいなくなったら仕事が回らない」を解決 属人的な業務から脱却する「最適化」の実践方法
 PR
PR2025.11.28
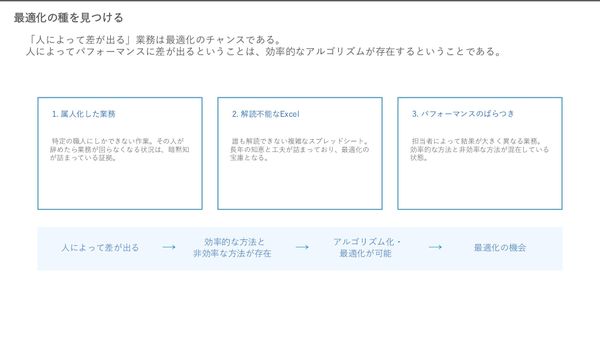
「計画と運用」をごちゃ混ぜにすると崩壊する ビジネスに使える最適化システムの“境界線”の引き方
 PR
PR2025.11.27
9割がリピーターでも“飽きられない”仕掛け 馬渕磨理子氏×オリエンタルランドが語る、体験価値と「成長の3本柱」
 PR
PR2025.11.28
“テーマパークの外”への挑戦で売上1兆円を目指す 馬渕磨理子氏が迫る、オリエンタルランドの新領域戦略
 PR
PR2025.11.28
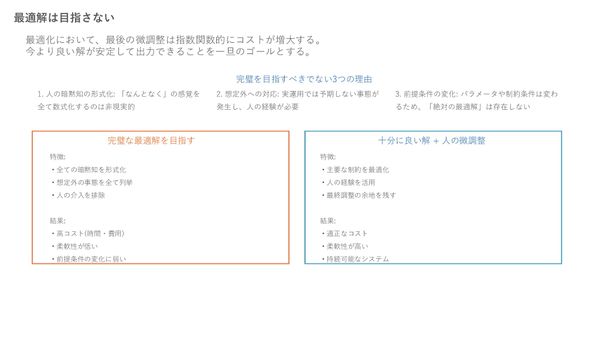
物価上昇時代の“もう1つの収入源” 自己資本約10万円から始められる、不動産投資の仕組みとリスク解説
 PR
PR2025.11.27
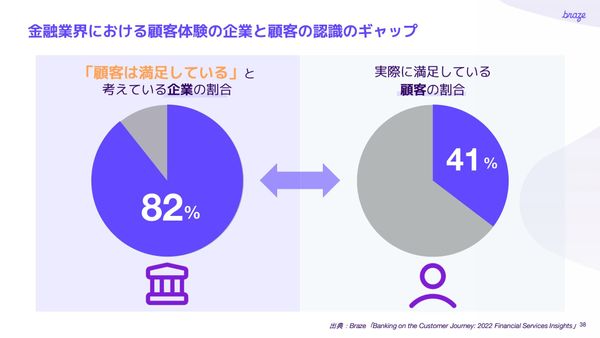
AIで激変する顧客体験──「金融機関」と「消費者」の関係を再設計 Brazeが描く“真の顧客エンゲージメント”とは
 PR
PR2025.11.28
金融機関の休眠顧客をアクティブユーザーへと転換 Brazeが提供する、収益改善を実現する「パーソナライゼーション」事例
 PR
PR2025.11.28
管理職に求めすぎる組織の限界 役割分割で生まれる新しいチーム運営
 PR
PR2025.11.27
「考えろ」と言うだけの上司が組織を壊す 自律型人材が育たない本当の理由
PR2025.11.27
数理最適化のエキスパートが断言「AIブームで見落とされがちな重要技術」 1,300社が導入した「演繹的AI」が意思決定を変える
PR2025.11.28
「あの人がいなくなったら仕事が回らない」を解決 属人的な業務から脱却する「最適化」の実践方法
PR2025.11.28
「計画と運用」をごちゃ混ぜにすると崩壊する ビジネスに使える最適化システムの“境界線”の引き方
PR2025.11.27
9割がリピーターでも“飽きられない”仕掛け 馬渕磨理子氏×オリエンタルランドが語る、体験価値と「成長の3本柱」
PR2025.11.28
“テーマパークの外”への挑戦で売上1兆円を目指す 馬渕磨理子氏が迫る、オリエンタルランドの新領域戦略
PR2025.11.28
物価上昇時代の“もう1つの収入源” 自己資本約10万円から始められる、不動産投資の仕組みとリスク解説
PR2025.11.27
AIで激変する顧客体験──「金融機関」と「消費者」の関係を再設計 Brazeが描く“真の顧客エンゲージメント”とは
PR2025.11.28
金融機関の休眠顧客をアクティブユーザーへと転換 Brazeが提供する、収益改善を実現する「パーソナライゼーション」事例
PR2025.11.28
管理職に求めすぎる組織の限界 役割分割で生まれる新しいチーム運営
PR2025.11.27
「考えろ」と言うだけの上司が組織を壊す 自律型人材が育たない本当の理由

