

 PR
PR2026.04.07
若手社員の7割が「管理職になりたい」を選ばない 調査でわかった課題と打開策
「空の移動革命、空飛ぶクルマに挑む」社員講演③(全1記事)
提供:株式会社デンソー
コピーリンクをコピー
ブックマーク記事をブックマーク
山田洋次氏:私からはモーターに関してお話しします。今回は、空用とクルマ用の違いを交えながら、モーターの中身について説明します。
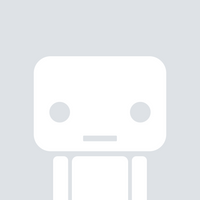
こちらは、クルマと空での使われ方の違いを示している表になります。大きく違うのは、やはり機体総重量に対しての推進装置、EPUの重量の割合が大きいことです。
EPUは、モーターとインバーター両方を含んだ重量になるんですが、この表にあるように、クルマだと50kgほど、空だと300kgほどということで、総重量に対しての割合が非常に大きくなっていることがわかるかと思います。
総重量が多くなると、それを支える機体の重量も重くなってきます。その機体の重量が重くなった状態で航続距離を伸ばそうとすると、バッテリー容量を増やさないといけない。バッテリー容量を増やすと、またバッテリー重量が増える。なのでEPUの重量が、航空機にとって非常に重要なものになってきます。
さらにこの機体総重量が大きくなるということは、乗客数や積載容量など、ペイロードがその分少なくなってしまうので、ビジネスという面でも競争力が失われてしまうデメリットが発生してきます。なので、軽量化は非常に重要な技術課題であるといえます。
また、空用のモーターは比較的高トルクで連続駆動を行いますので、そのモーターから発生した熱をいかに効率良く逃がしていくかも、非常に重要になってきます。冷却性というところも、大きな課題となります。
それに加えて、安全性は空では非常に重要な課題です。クルマだと異常があった場合、退避走行によって路肩に停止するなどで安全を確保できますが、空の場合だと停めることができないため、特に安全性確保が重要になってきます。EPUとしての信頼性、これが重要になってきます。

モーターには軽量化、冷却性、信頼性をすべて成し遂げることが非常に重要になっているといえます。
次にモーターの駆動領域について説明します。左側の図は、クルマのモーターの特性カーブを示しています。急坂路走行だと、高トルクなモーター特性が必要になります。
それに対して、高速走行時は高回転なモーター特性が必要になるので、広い範囲での駆動領域が不可欠になります。その中でも、特に市街地は低トルク駆動領域が非常に多くなってきて、この領域の高効率化が求められる特性になります。
対して右側の図にあるように、空用のモーターは、このような特性カーブが求められます。特にeVTOLでは、Hoverで離陸して、Cruiseで巡航、Hoverで着陸、というような決められた運行パターンになるので、このような比較的高いトルクの領域での連続駆動が必要になってきます。
さらには1fail時、つまりプロペラを複数持っていて、そのうちの1つが故障した場合、残りのモーターでそれをカバーすることになるので、Hoverよりも高い出力が必要になってくる。
全体を通して見ると、やはり高トルクでの連続駆動が、空モビモーターの特徴になっています。こういった駆動時のモーターから発生する熱をいかに効率良く取り去るかが大事になってきますので、冷却性は非常に重要な課題となります。

次にモーター方式の具体的な磁気回路構造について説明します。左側はクルマ用モーターの磁気回路構造で、先ほど説明した可変速特性を実現するためにIPMローターを採用しています。
ローターの中に磁石を埋め込むかたちの構造で、これによって可変速特性を得やすくなります。ステーターに関してもSC、Segment Conductorの巻線を採用することで、低振動、低騒音なモーターを達成しています。
対して右側の空用モーターは、先ほどの可変速特性は不要で、比較的高トルクな領域で駆動することが求められるので、高トルクを出しやすい表面に磁石を貼り付けたSPM型のローターを採用します。
このように、磁石使用量を増やすことで積極的に磁石磁束を活用し、高トルク特性を実現していきます。さらに磁石の数を増やして多極化し、ローターの磁石配向を工夫することによって、磁石磁束を向上させます。また、高性能なコア材を採用することで、その発生した磁束を高密度に流せるので、空用モーターの軽量化が実現します。

続いてモーターの構造材料について説明します。上がモーターの断面図、下側にモーターに使われる材料特性を示しています。先ほど説明した磁気回路を支えるかたちで、構造体が取り囲んでいます。
空モビのモーターだと、磁気回路と構造重量がおおよそ半々になっているということで、構造重量の低減も非常に重要な課題となります。
下側の表は材料の物性値を示していますが、クルマ用の材料は、コストも考えると一般的に鉄やステンレス、アルミといった材料を使うことになります。
対して空用のモーターは、より強度の高いチタンや、強度に加えて熱伝導率を上げた金属複合材、さらには強度と軽量を両立させたCFRPを使うことで軽量化を実現しています。

続いて冷却方式について説明します。一般的なクルマの場合、冷却方式は水冷か油冷になるかと思います。左の図にあるように、液冷の場合だと、モーターに加えて水や油を循環させるポンプや、それを通す配管路、あとは取り去った熱を空気と交換する熱交換器といった新たな部品が必要になってきます。
そうするとやはり重量的には不利になり、さらには部品点数が増えていくので、信頼性という面でも各部品には故障率の低いシステムが求められることになります。
そのため空モビ用モーターには空冷が求められていると考えています。空冷にすると、これまでの冷却システムは不要になり、モーターのハウジングの外側に冷却フィンが付くだけの、シンプルなシステムで構成できます。こうすることで重量低減に貢献、そして信頼性向上にも貢献できると考えています。

ただし、100kW級のモーターなので、熱も無視できず、この放熱をいかに空冷で実現させるかが非常に重要な課題になると思っています。
空冷の実現のために、私たちはこのような半径方向の速度分布や、軸方向の速度変化を解析でシミュレーションしています。ローター下流の速度分布の解析をすることで、モーターの配置によってモーター側面に得られる風速の定量化を計算しています。
右側のコンター図は、実際にそれをシミュレーションで解析した結果です。こういったローターから得られる冷却風を分析して、より高効率な空冷設計に反映させていきます。

私たちは、先ほどのローターからの風と並行して、強制的に風を送る強制空冷も同時に開発しています。ローター下流の流速解析結果を左の図に示していますが、ローターからの流入風はやはりモーターの搭載位置や運転条件によって大きく変わってきます。
さらにはプロペラの仕様でも大きく変わることがあります。このような環境の変化を極力避けるために、自らモーターにファンを持たせて強制風をモーター側面に発生させることを考えています。
右側の図は、実際に速度分布をシミュレーションした結果で、こういったファンを搭載する強制冷却方式も、並行して検討しています。

私たちは、このような技術の実機検証を行いながら、モーターのさらなる出力密度向上に向けて、開発を進めています。
続きを読むには会員登録
(無料)が必要です。
会員登録していただくと、すべての記事が制限なく閲覧でき、
スピーカーフォローや記事のブックマークなど、便利な機能がご利用いただけます。
すでに会員の方はこちらからログイン
名刺アプリ「Eight」をご利用中の方は
こちらを読み込むだけで、すぐに記事が読めます!
スマホで読み込んで
ログインまたは登録作業をスキップ
株式会社デンソー
この記事をブックマークすると、同じログの新着記事をマイページでお知らせします
PR2026.04.07
若手社員の7割が「管理職になりたい」を選ばない 調査でわかった課題と打開策
 PR
PR2026.03.24
「成果より努力を評価してほしい」 Z世代新入社員に広がる“プロセス重視”の背景
 PR
PR2026.03.25
新人の配属1〜3ヶ月目は「自信がなくなるフェーズ」 部下のタイプ別育成アプローチ
 PR
PR2026.03.16
製造業の6割が警戒する自然災害 予期せぬリスクで事業を止めないための「BCP×保険」の現実解
 PR
PR2026.02.26
メール共有しても二重対応や漏れ・・・ コールセンターの悩みを解決する「楽楽自動応対」の4つの機能
 PR
PR2026.02.27
「印象評価」からの脱却 経営層や現場を巻き込む“タレントマネジメント”の正しい進め方
 PR
PR2026.02.27
人事と現場が抱える「3つのズレ」とは 組織の成長を加速させる「タレントマネジメント」活用術
 PR
PR2026.01.19
業務フローを変えずに、メール1通3分を削減 自動でAIにナレッジが貯まる問い合わせシステム「楽楽自動応対」
 PR
PR2026.01.26
新規開拓でBtoBマーケターが直面する2つの課題 アポ獲得コストを2分の1にする、楽楽メールマーケティング活用法
 PR
PR2026.01.08
入社4年目の社員が“暗黒のExcel時代”を改革 売上金額2倍、年間110万円のコストカットを実現した方法
PR2026.04.07
若手社員の7割が「管理職になりたい」を選ばない 調査でわかった課題と打開策
PR2026.03.24
「成果より努力を評価してほしい」 Z世代新入社員に広がる“プロセス重視”の背景
PR2026.03.25
新人の配属1〜3ヶ月目は「自信がなくなるフェーズ」 部下のタイプ別育成アプローチ
PR2026.03.16
製造業の6割が警戒する自然災害 予期せぬリスクで事業を止めないための「BCP×保険」の現実解
PR2026.02.26
メール共有しても二重対応や漏れ・・・ コールセンターの悩みを解決する「楽楽自動応対」の4つの機能
PR2026.02.27
「印象評価」からの脱却 経営層や現場を巻き込む“タレントマネジメント”の正しい進め方
PR2026.02.27
人事と現場が抱える「3つのズレ」とは 組織の成長を加速させる「タレントマネジメント」活用術
PR2026.01.19
業務フローを変えずに、メール1通3分を削減 自動でAIにナレッジが貯まる問い合わせシステム「楽楽自動応対」
PR2026.01.26
新規開拓でBtoBマーケターが直面する2つの課題 アポ獲得コストを2分の1にする、楽楽メールマーケティング活用法
PR2026.01.08
入社4年目の社員が“暗黒のExcel時代”を改革 売上金額2倍、年間110万円のコストカットを実現した方法
